Poster
Paper

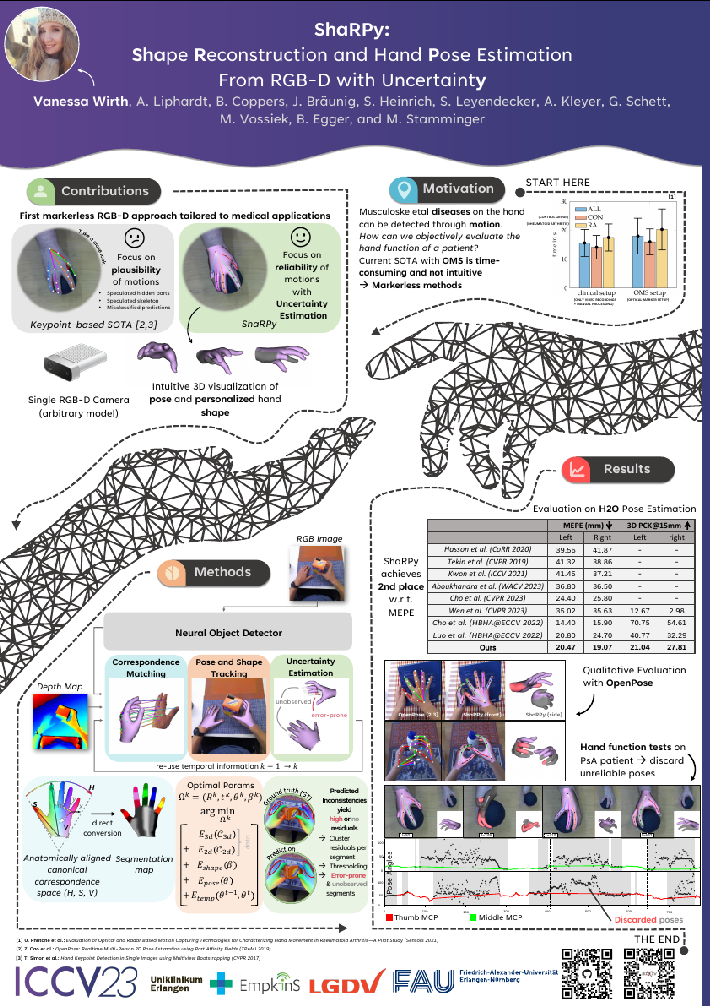
Despite their potential, markerless hand tracking technologies are not yet applied in practice to the diagnosis or monitoring of the activity in inflammatory musculoskeletal diseases. One reason is that the focus of most methods lies in the reconstruction of coarse, plausible poses, whereas in the clinical context, accurate, interpretable, and reliable results are required.
Therefore, we propose ShaRPy, the first RGB-D Shape Reconstruction and hand Pose tracking system, which provides uncertainty estimates of the computed pose, e.g., when a finger is hidden or its estimate is inconsistent with the observations in the input, to guide clinical decision-making. Besides pose, ShaRPy approximates a personalized hand shape, promoting a more realistic and intuitive understanding of its digital twin. Our method requires only a light-weight setup with a single consumer-level RGB-D camera yet it is able to distinguish similar poses with only small joint angle deviations in a metrically accurate space. This is achieved by combining a data-driven dense correspondence predictor with traditional energy minimization. To bridge the gap between interactive visualization and biomedical simulation we leverage a parametric hand model in which we incorporate biomedical constraints and optimize for both, its pose and hand shape.
We evaluate ShaRPy on a keypoint detection benchmark and show qualitative results of hand function assessments for activity monitoring of musculoskeletal diseases.
@InProceedings{Wirth_2023_ICCV,
author = {Wirth, Vanessa and Liphardt, Anna-Maria and Coppers, Birte and Br\"aunig, Johanna and Heinrich, Simon and Leyendecker, Sigrid and Kleyer, Arnd and Schett, Georg and Vossiek, Martin and Egger, Bernhard and Stamminger, Marc},
title = {ShaRPy: Shape Reconstruction and Hand Pose Estimation from RGB-D with Uncertainty},
booktitle = {Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV) Workshops},
month = {October},
year = {2023},
pages = {2625-2633}
}This work was funded by the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) – SFB 1483 – Project-ID 442419336, EmpkinS.
This work used the German Research Foundation (DFG) funded major instrument (reference number INST90 / 985- 1 FUGG) at the Institute of Applied Dynamics (Sigrid Leyendecker), Friedrich-Alexander Universität Erlangen- Nürnberg Germany.
The authors gratefully acknowledge the scientific support and HPC resources provided by the Erlangen National High Performance Computing Center of the Friedrich-Alexander-Universität Erlangen-Nürnberg.