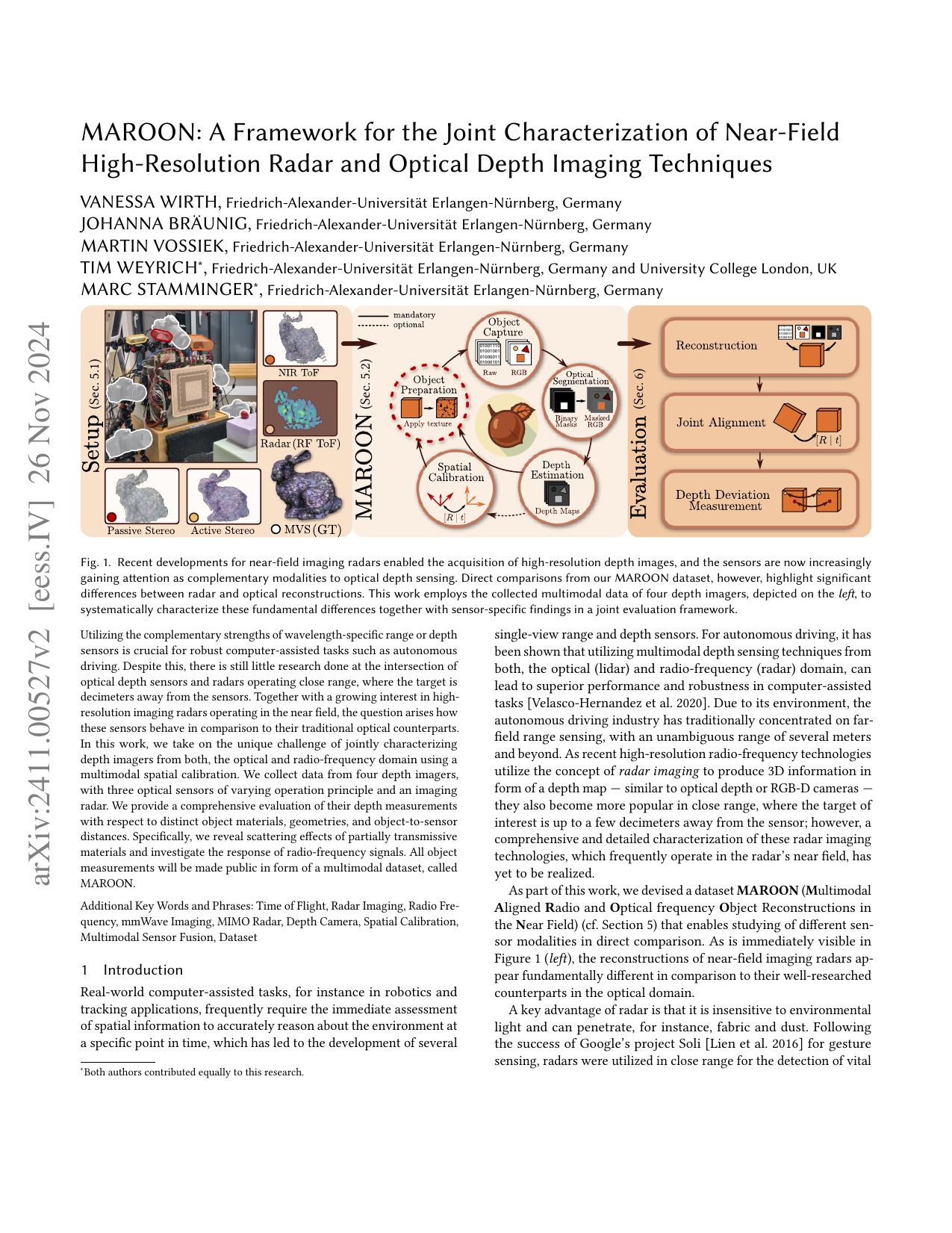
Utilizing the complementary strengths of wavelength-specific range or depth sensors is crucial for robust computer-assisted tasks such as autonomous driving. Despite this, there is still little research done at the intersection of optical depth sensors and radars operating close range, where the target is decimeters away from the sensors. Together with a growing interest in high-resolution imaging radars operating in the near field, the question arises how these sensors behave in comparison to their traditional optical counterparts.
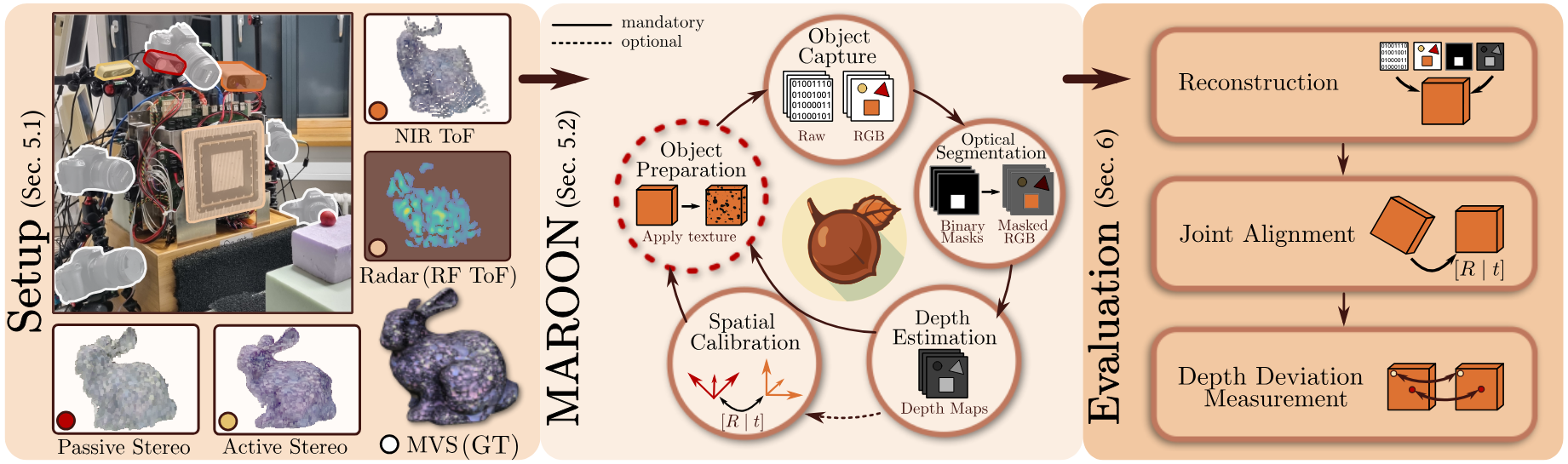
In this work, we take on the unique challenge of jointly characterizing depth imagers from both, the optical and radio-frequency domain using a multimodal spatial calibration. We collect data from four depth imagers, with three optical sensors of varying operation principle and an imaging radar. We provide a comprehensive evaluation of their depth measurements with respect to distinct object materials, geometries, and object-to-sensor distances. Specifically, we reveal scattering effects of partially transmissive materials and investigate the response of radio-frequency signals. All object measurements will be made public in form of a multimodal dataset, called MAROON.
The full dataset is available on Zenodo, where it is split into several .zip files:
| Required |
0_maroon_v2_meta.zip
|
Description |
| On Demand |
1_maroon_v2_radar_raw.zip
|
Contains the raw radar measurements, on which reconstruction can be performed by using this repository. |
| Optional |
1_maroon_radar_cached_1.zip,1_maroon_radar_cached_2.zip,1_maroon_radar_cached_3.zip
|
Contains the cached reconstructions. It is useful to download these in case you do not have a powerful GPU or don't want to wait for reconstruction to be performed first. |
| On Demand |
2_maroon_v2_kinect.zip
|
Contains the optical time-of-flight measurements (RGB, Infrared, Depth) of Microsoft's Kinect Azure Camera, with mask/segmentation annotations. |
| On Demand |
3_maroon_v2_realsense.zip
|
Contains the optical active stereo measurements (RGB, Depth) of the Intel Realsense D435i, with mask/segmentation annotations. |
| On Demand |
4_maroon_v2_zed.zip
|
Contains the optical passive stereo measurements (RGB, Depth) of Stereolabs' ZED camera, with mask/segmentation annotations. |
| On Demand |
5_maroon_v2_mvs.zip
|
Contains the ground-truth measurements obtained from a Multi View Stereo (MVS) system of 5 DSLR cameras, with mask/segmentation annotations. |
| Optional |
6_maroon_v2_extra.zip
|
Contains the calibration measurements, and additional measurements of the empty measurement room, without any object placed in front. |

@article{wirth2026maroon,
title = {{MAROON}: A Dataset for the Joint Characterization of Near-Field High-Resolution Radio-Frequency and Optical Depth Imaging Techniques},
author = { Wirth, Vanessa and Br{\"a}unig, Johanna and Hofmann, Nikolai and Vossiek, Martin and Weyrich, Tim and Stamminger, Marc },
journal = {Transactions on Graphics (to appear)},
volume = 45,
number = 2,
pages = {23:1--23:18},
publisher = {ACM},
year = 2026,
authorurl = {https://vwirth.github.io/maroon}
}
The authors would like to thank the Rohde & Schwarz GmbH & Co. KG (Munich, Germany) for providing the radar imaging devices.
This work was funded by the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) – SFB 1483 – Project-ID 442419336, EmpkinS.
The authors gratefully acknowledge the scientific support and HPC resources provided by the Erlangen National High Performance Computing Center (NHR@FAU) of the Friedrich-Alexander-Universität Erlangen-Nürnberg (FAU) under the NHR project b175dc. NHR funding is provided by federal and Bavarian state authorities. NHR@FAU hardware is partially funded by the German Research Foundation (DFG) – 440719683.